ik heb hier een oefening waar ik de transfertfunctie moet zoeken. Maar ik zit al vast om de differentiaalvergelijkingen te zoeken, kan iemand me helpen??
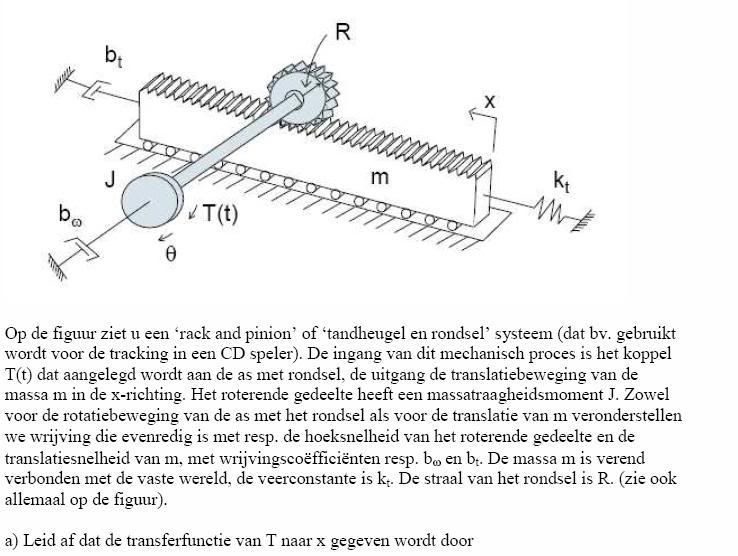
Tis vooral wat ik met dat tandwiel moet doen waar ik last mee heb.
alvast bedankt
Moderator: physicalattraction


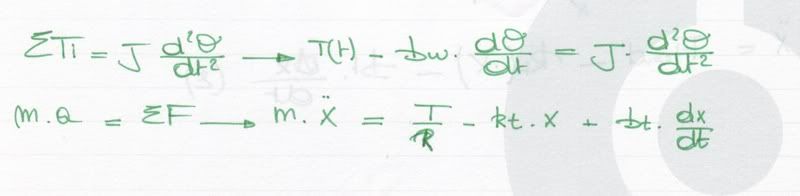
aadkr schreef:\(T_{t}=J.\ddot{\theta}\)\(x=R.\theta\)\(\dot{x}=R.\dot{\theta}\)\(\ddot{x}=R.\ddot{\theta}\)

Ja maar je moet een verband tussen koppel en de horizontale verplaatsing zoeken.DePurpereWolf schreef:Moet je niet gewoon een krachten vergelijking opstellen dan?
Fvr = -kx
Fdmp = -bv
Ftrg = -ma
Ofwel:
Fvr = -kx
Fdmp = -bx'
Ftrg = -mx''
Het kan zijn dat ik nu te simpel denk.
Die kracht is dat gewoon T/R --> moment gedeeld door de straal van het rondsel? Ben nog altijd in de war want volgens mij zit ik nog met een kracht te weinig in mijn vergelijkingen?DePurpereWolf schreef:Inderdaad, die moet je gewoon aan elkaar gelijk zetten, je gaat er van uit dat de kracht overdracht van tandwiel naar heugel met volledig rendement gaat.
Dus de differentiaal vergelijking van het translatie deel stel je gelijk aan de differentiaal vergelijking van het rotatie deel.
Er is de kracht die horizontaal gericht staat op het punt van het tandwiel naar de heugel, en er is de kracht die de heugel vereist om te verplaatsen.